Számos közúti baleset a járművek oldalirányú stabilitásához köthető. A motorok imbolygó mozgása, a vontatmányok kígyózása és a bőröndök pattogása régóta vizsgált járműstabilitási problémák, mégis ma is aktívan kutatott területek. Hasonló jelenség a vontatott kerekek szitálása, amely pl. babakocsik, bevásárlókocsik, repülőgép orrfutóművek esetén fordulhat elő. A térbeli gördülés bonyolultsága miatt a szakirodalomban kevés az analitikus, a gyakorlatra nézve ökölszabályként alkalmazható eredmény. Kutatásomban elektromos rollerek esetén igyekszem az ilyen irányú ismereteink bővítésére.
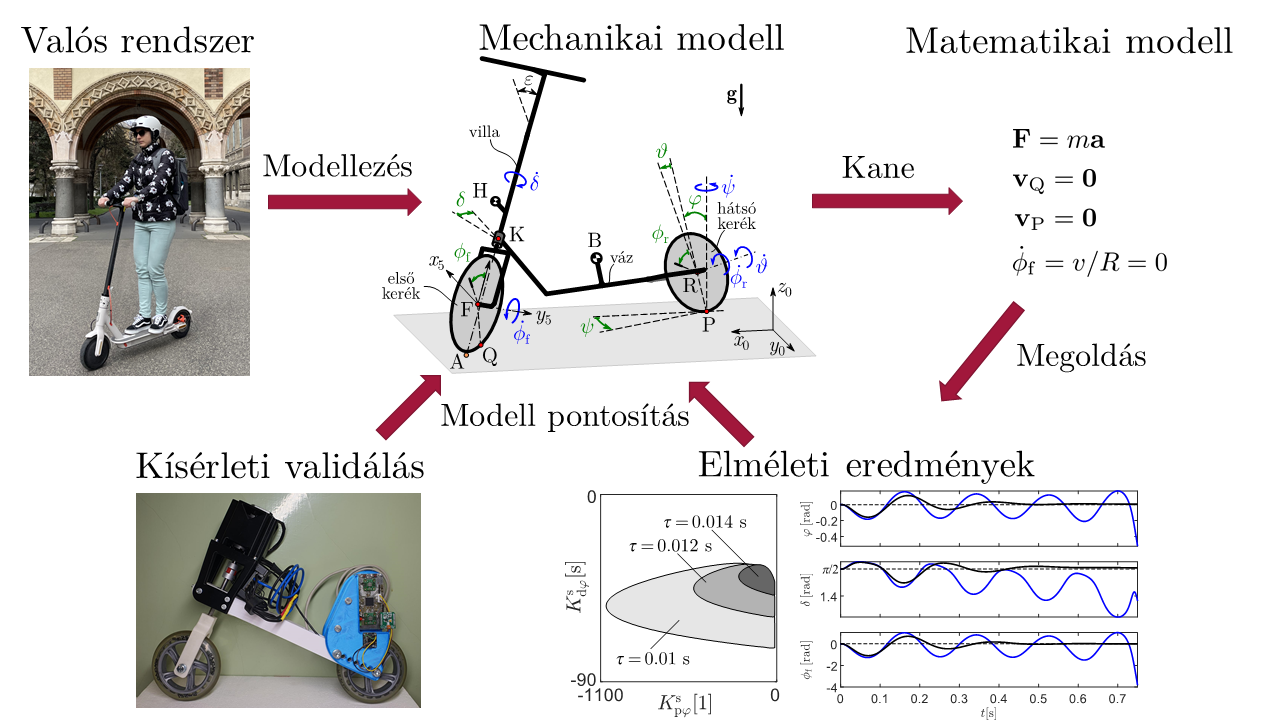
Ehhez olyan térbeli mechanikai modellek megalkotására van szükség, melyek magukban hordozzák a gördüléses kényszerkapcsolat (kerék-talaj kapcsolat) különleges dinamikáját, de még analitikus módszerekkel kezelhetők. Az ilyen egyszerűsített modelleken alapuló vizsgálatok magukkal vonják a kísérleti igazolás szükségességét, így az analitikus és numerikus nemlineáris vizsgálatok mellett erre is külön figyelmet fordítok. Az önvezető elektromos roller álló helyzetben való aktív stabilizálásához olyan kormányszabályozást tervezek, amely a szabályozási körben fellépő időkésés ellenére képes egyensúlyban tartani a rollert. A szabályozás paramétereinek optimalizálása mellett, stabilitási térképek és nemlineáris szimulációk alapján a roller geometriai paramétereinek (utánfutás, villaszög, villa súlypontja) előnyös megválasztására is javaslatot teszek.
Elektromos roller stabilizálása
2024. július 28. vasárnap, 15:22
Képek
- A hozzászóláshoz be kell jelentkezni
